一、原理分析
1.1 算法思想
算法思想1如下图所示,在一张图片中,定义一个小于图片尺寸的矩形框,该矩形框可以用窗口函数W(X,Y)表示。扫描图片分两个步骤:
- 矩形框从左到右,从上到下扫描图片。
- 矩形框每移动一个位置,就会计算该位置时候存在角点。通过在当前位置进行上下左右的细微平移,计算在这灰度变化值。(原理是这样,实际当然不可能这么操作,会先计算梯度)
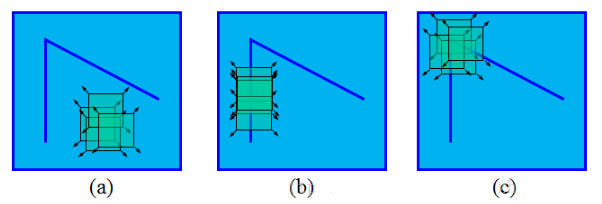
通过修改矩形框的大小,可以识别图片中不同大小的角点。
1.2 数学表示
图像窗口平移(u,v)后的自相似性如下公式,其中$w(x,y)$是窗口函数(有不同种类的窗口函数),$I(x,y)$是图片x,y处的像素值。
算法优化,将$I(x+u,y+v)$泰勒展开如下,其中$I_x,I_y$是在x,y点图像的梯度。
带入原式得:
其中M的表达式为:
可以看到M为一个2*2的矩阵,该矩阵一定可以化成如下形式(线性代数叫做:二次型化标准型),其中$\lambda_1,\lambda_2$为M的特征值。
最终带入原式得:
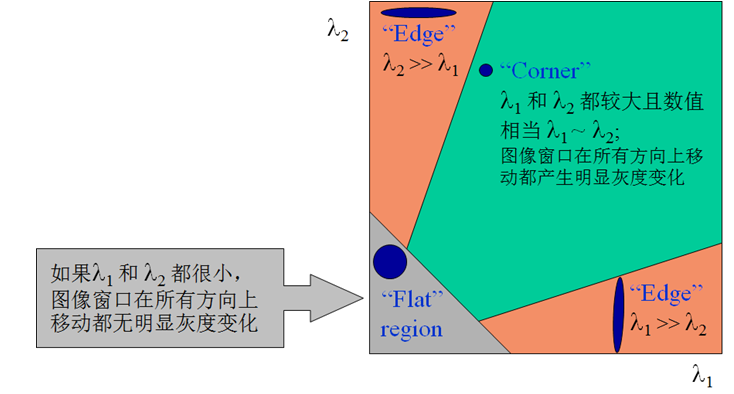
可以看到,如果E固定,那么这是一个椭圆函数。通过$\lambda_1,\lambda_2$可以确定灰度值的在x,y方向上的变化率。所以只需要计算这两个值,就可以判定此处是否为角点,通常需要设置一个阈值。判断图如下:
Harris中检验角点的函数如下,k的值一般为0.04~0.06。
再设置一个阈值即可判断角点。
二、代码实现
2.1 环境说明
语言:python3.73
系统:win10
框架:opencv
2.2 完整代码
1 | import cv2 as cv |
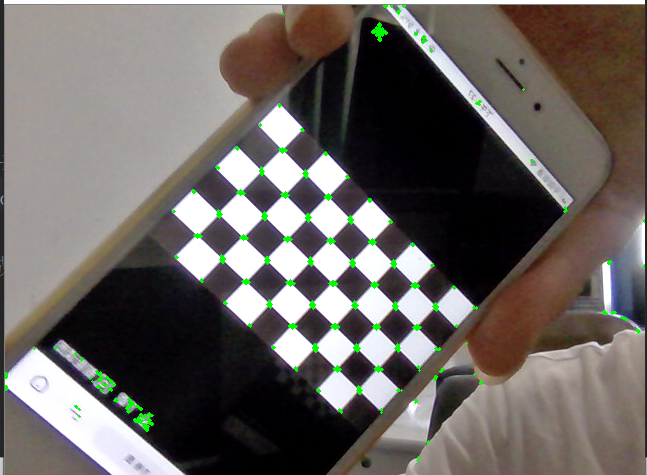
运行结果如下:
2.3 函数介绍
Opencv 中的函数 cv2.cornerHarris() 可以用来进行角点检测。参数如
下2:
• img - 数据类型为 float32 的输入图像。
• blockSize - 角点检测中要考虑的领域大小。
• ksize - Sobel 求导中使用的窗口大小
• k - Harris 角点检测方程中的自由参数,取值参数为 [0,04,0.06].
参考文献
1. Harris及Shi-Tomasi原理及源码解析 ↩
2. cv2.cornerHarris()详解 ↩
